Вращающийся датчик расстояния в движении
После испытаний вращающегося датчика расстояния в состоянии покоя были проведены испытания в движении. Вот как выглядит картинка этих испытаний:
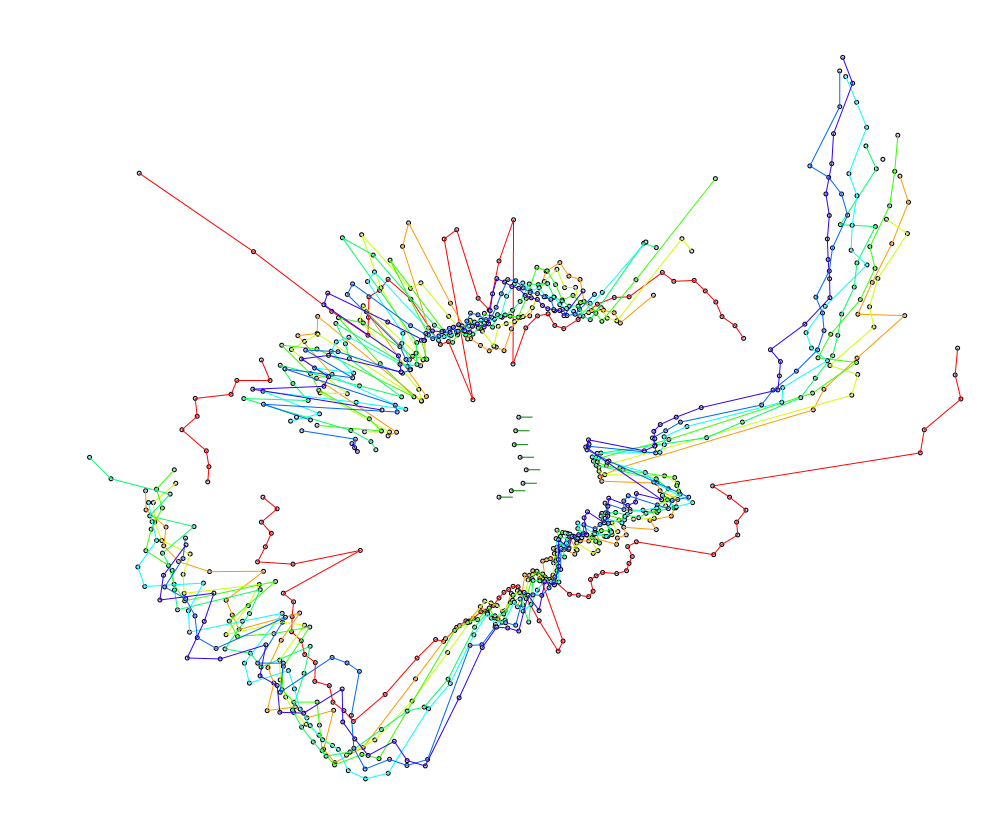
Цвета меняются как в радуге от красного к фиолетовому. Видны погрешности измерений. Точки в центре, координаты центра робота, черта рядом — направление оси X робота. Робот управлялся вручную, то есть делал шаг и производились замеры расстояний. По картинке видно, что робот помимо того, что передвигался, оказалось еще и медленно поворачивался по мере движения против часовой стрелке. На глаз это практически незаметно, но на диаграмме замеров хорошо видно. Таким образом, если продумать алгоритм, можно контролировать перемещения робота и корректировать его координаты по мере движения. Вот еще одна красивая диаграмма, здесь перемещений и замеров гораздо больше, робот выходит из кухни в коридор:
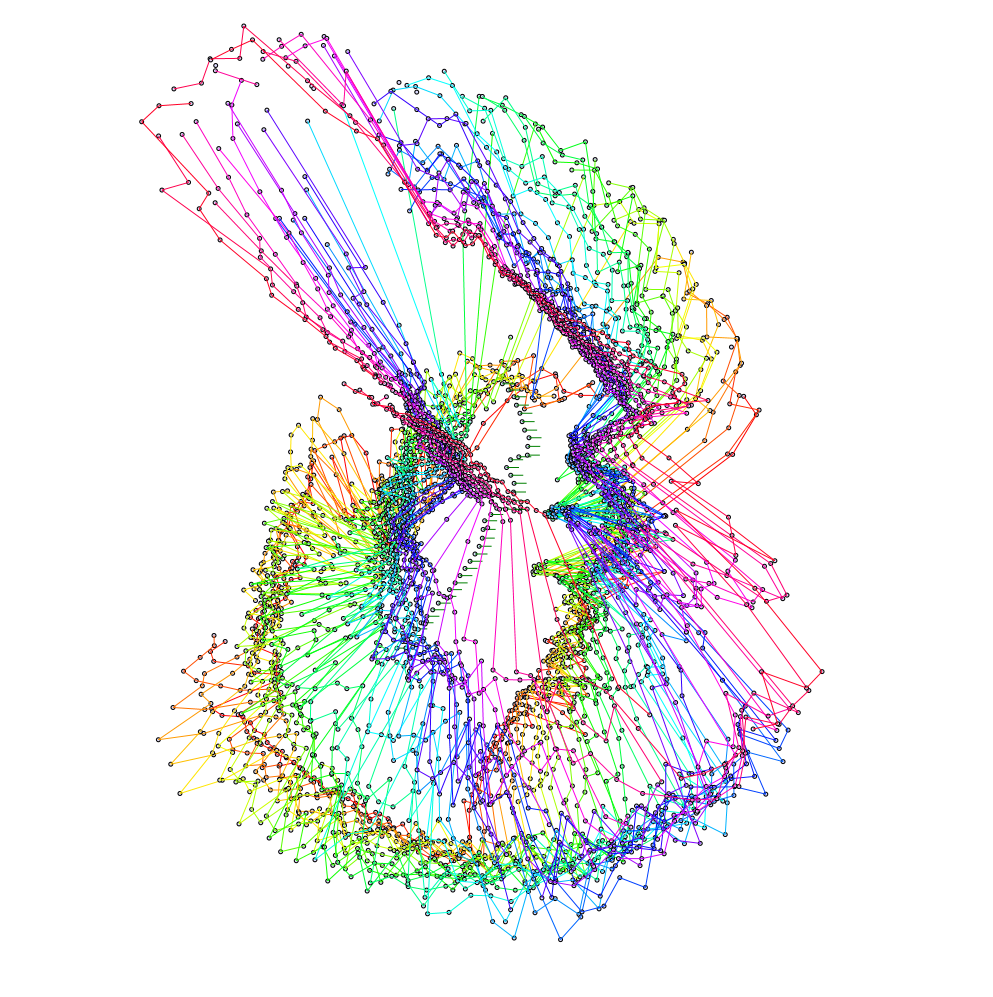
Так же видно небольшое вращение против часовой стрелки, коррекция координат робота по измеренным расстояниям пока не производилась.
Первое тестирование вращающегося датчика расстояния Второй вариант вращающегося датчика расстояния