Второй вариант головы робота
Исследования с новой кинематикой вращающегося датчика расстояния позволили спроектировать и создать второй вариант головы робота. Вот как она выглядит в модели:
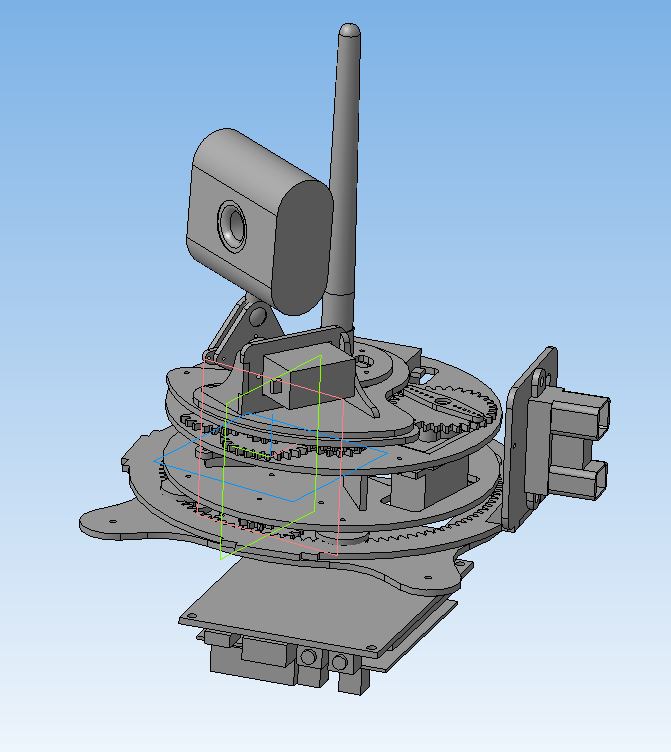 Использование сервопривода с разделенной кинематикой и резистором обеспечивающего обратную связь позволило сделать два разных варианта кинематики для вращения датчика расстояния и платформы видеокамеры. Обе этих схемы обеспечивают вращение на угол более 360 градусов, но сделаны немного по разному. Кроме того, основа головы не вращается, что дает множество дополнительных плюсов в проектировании. Вот как выглядит новая голова:
Использование сервопривода с разделенной кинематикой и резистором обеспечивающего обратную связь позволило сделать два разных варианта кинематики для вращения датчика расстояния и платформы видеокамеры. Обе этих схемы обеспечивают вращение на угол более 360 градусов, но сделаны немного по разному. Кроме того, основа головы не вращается, что дает множество дополнительных плюсов в проектировании. Вот как выглядит новая голова:

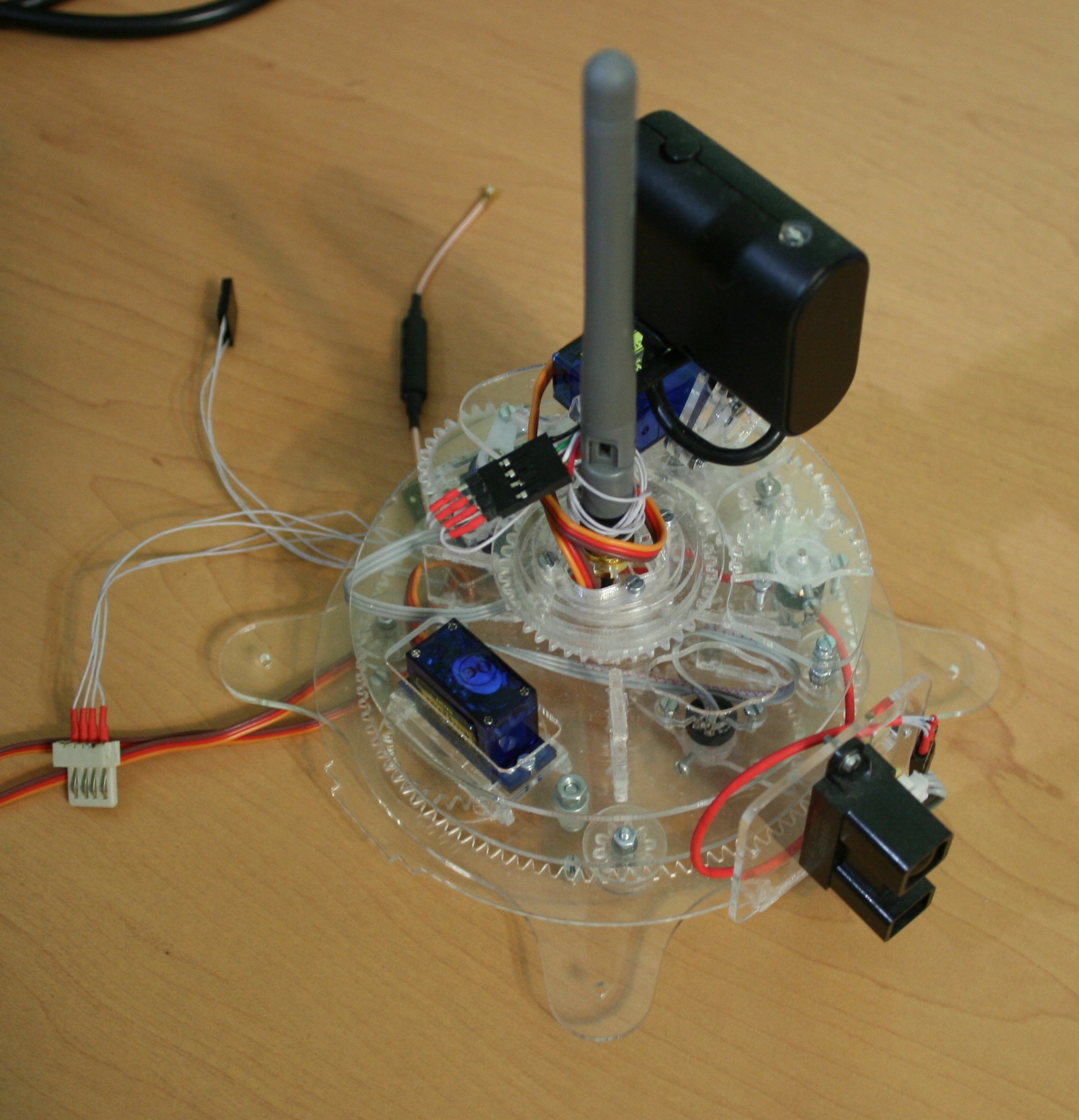
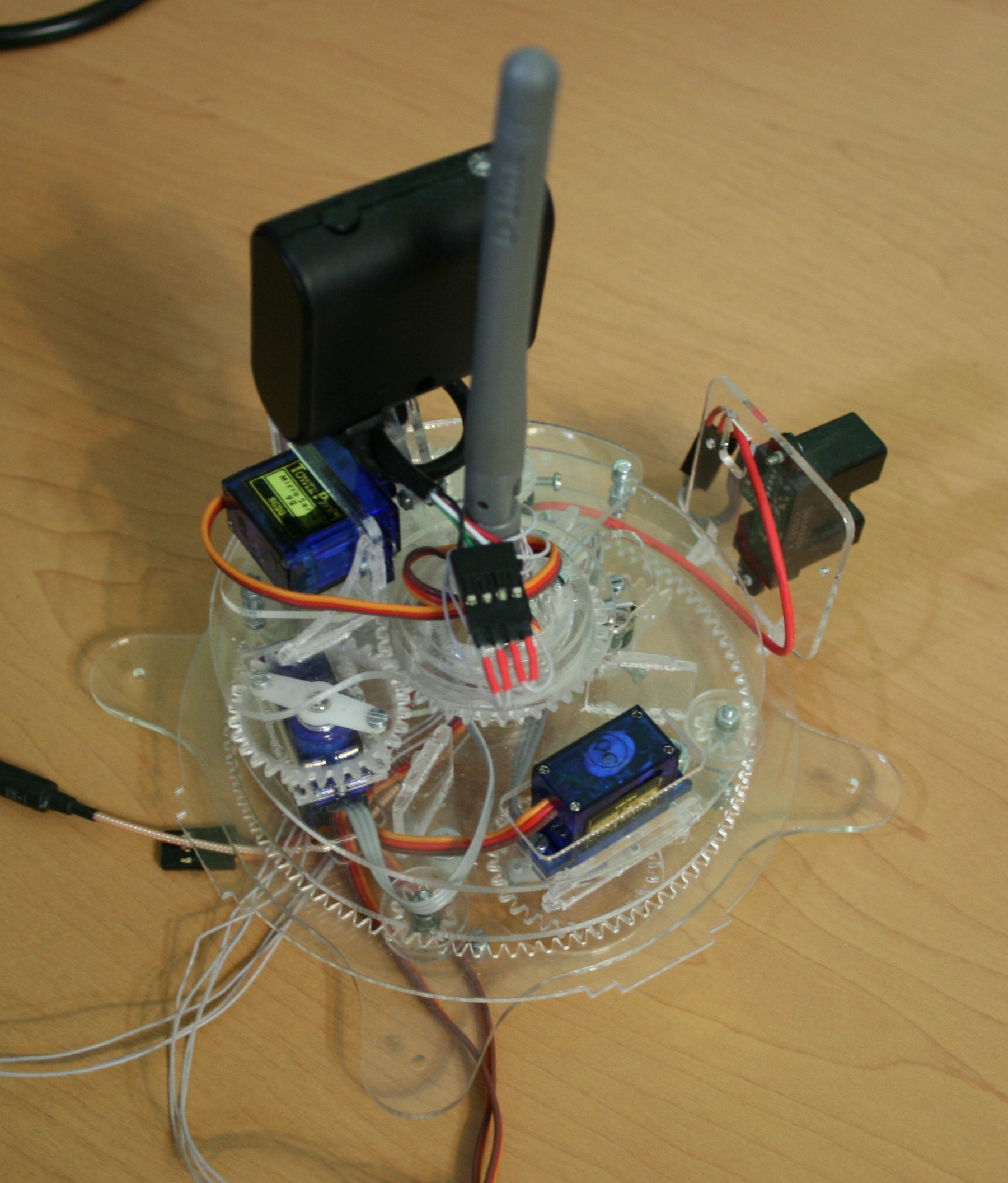
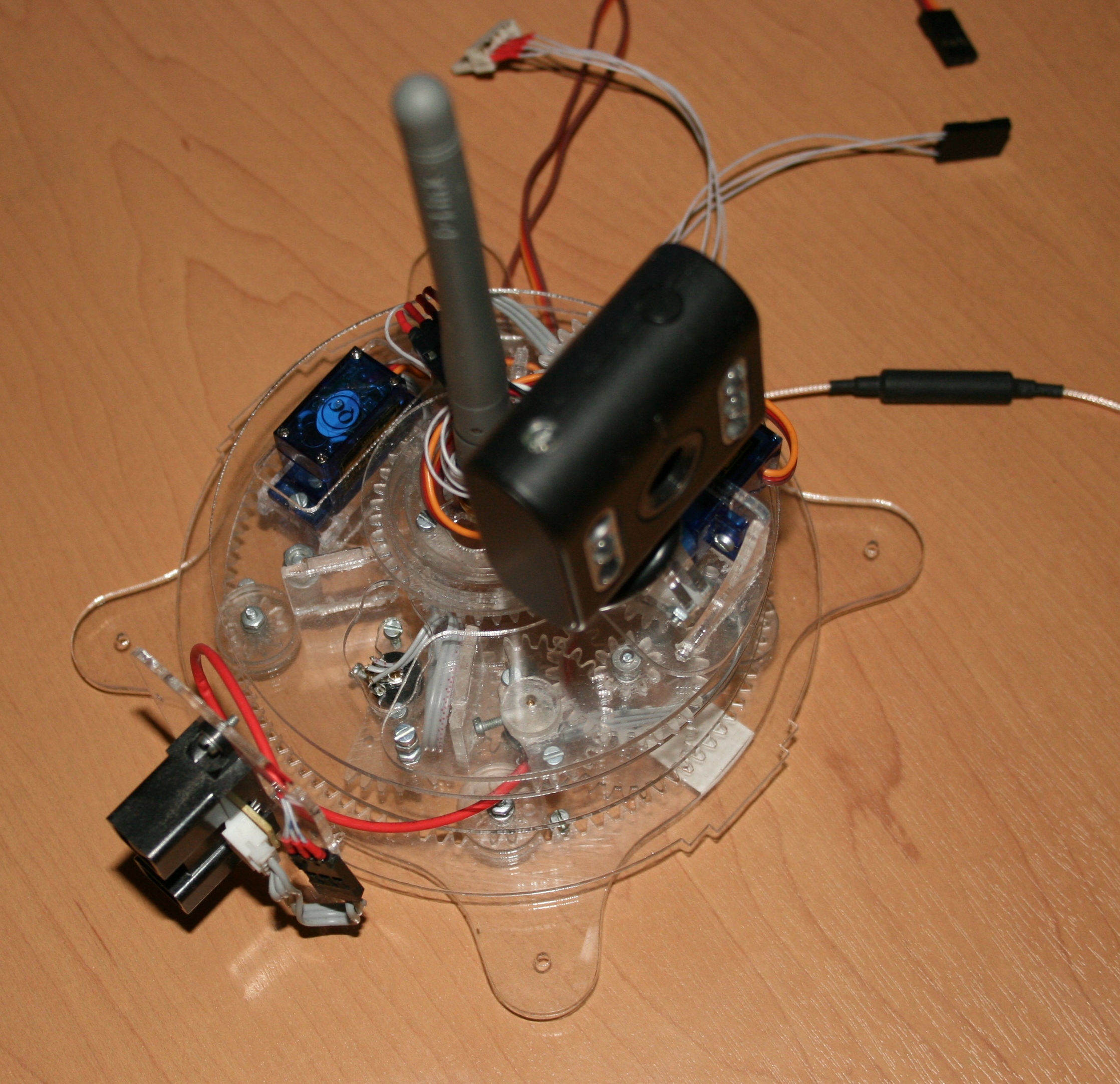
На этот раз много фотографий, жаль было выбрасывать, да и время на создание головы было потрачено много, при всей получившейся простоте процесс создания оказался не прост.
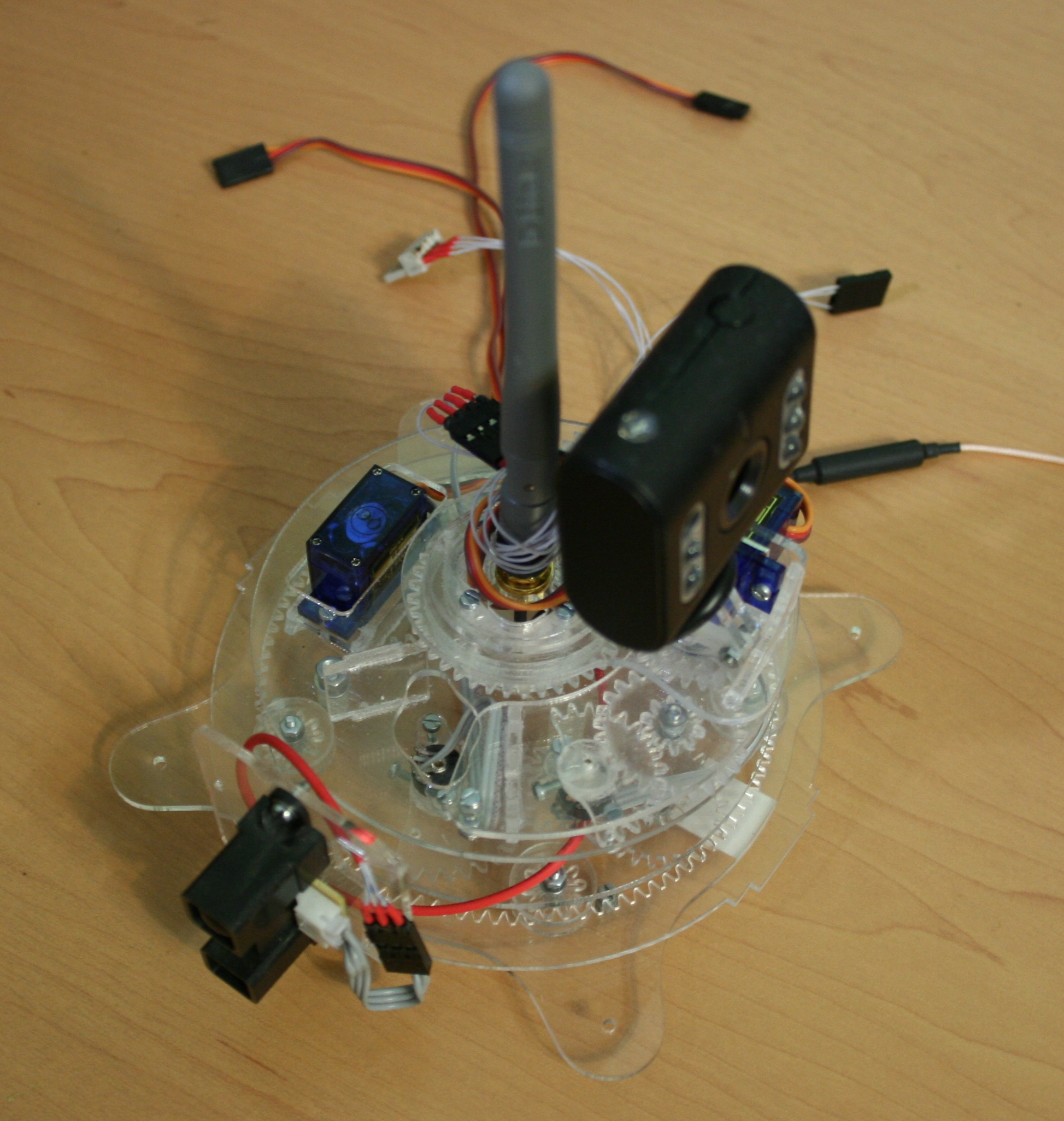
Предварительные тесты при подключении к контроллеру показали, что все подвижные части движутся как запланировано. Теперь предстоят тесты датчика расстояния и его погрешностей позиционирования.
Второй вариант вращающегося датчика расстояния Алгоритм локализации робота