Первый опыт использования 3D принтера
Из за сильной занятости пришлось сильно сократить время на робота, поэтому пока сосредоточился на программной части и занимался совершенствованием алгоритмов работы с роботом. Доработал систему классов управления роботом так что бы можно было делать различные варианты перемещения. Но, видимо, вселенная ожидает от меня чего то другого и так получилось, что я по неосторожности уронил на робота блок питания, да так неудачно, что сломал ему плечо. Вот как выглядит разрушенное плечо робота:
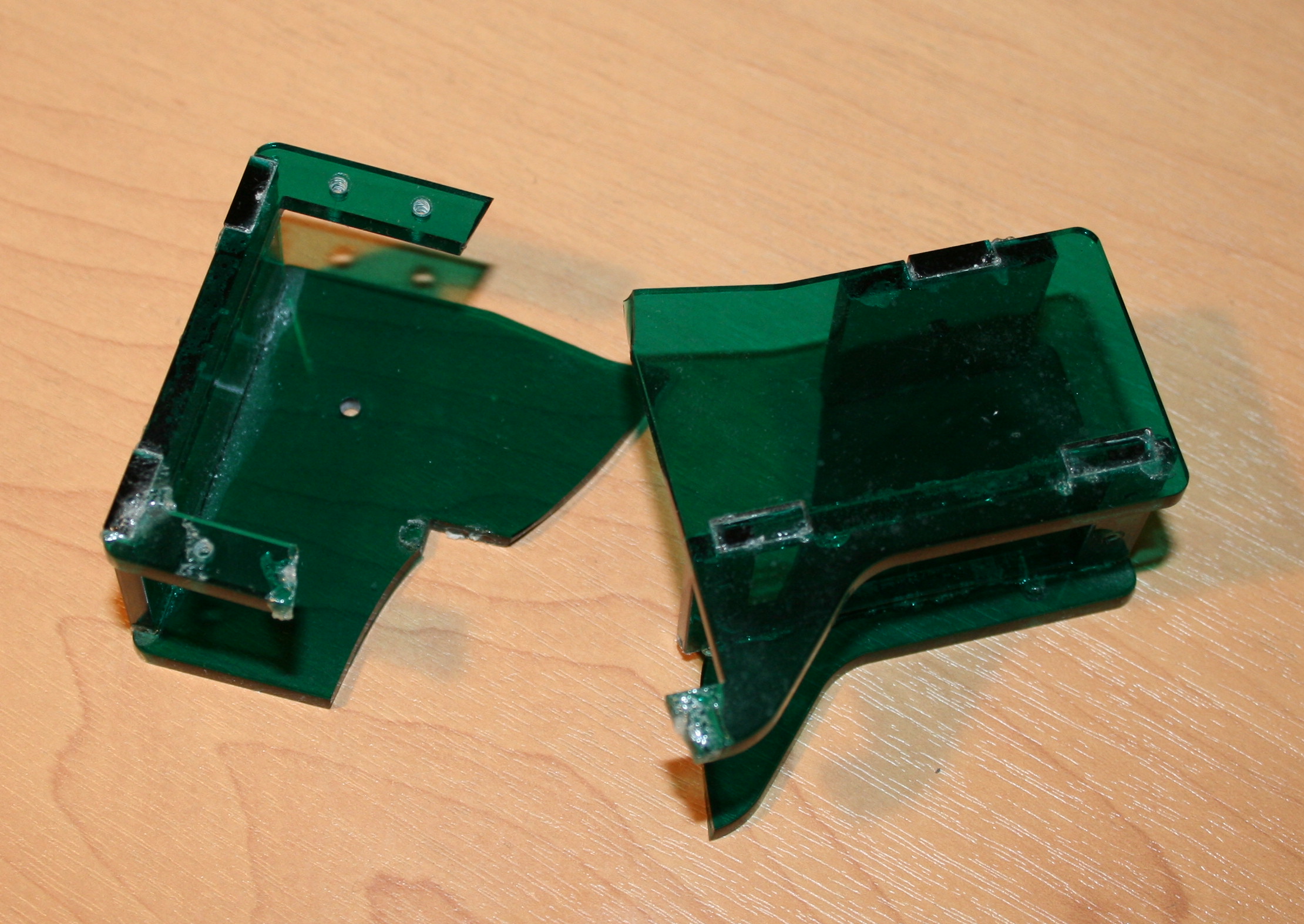
К сожалению, акрил достаточно хрупкий и удар был существенный, так что претензий к акрилу нет. Я уже было собрался заказать как обычно нарезку сразу несколько комплектов плеча из акрила (что бы иметь запас на случай поломки), как вспомнил, что мир то уже изменился и есть замечательные устройства — 3D-принтеры. Достоинства 3D-печати в том, что можно сделать практически любую объемную модель цельной, без склейки отдельных деталей. Для этого пришлось создать другую модель плеча, специально для печати на 3D-принтере. Создавалась она на основе существующего плеча, но с учетом минимизации поддержек при печати, особенностей и новых возможностях 3D-печати. Появилась возможность делать фаски, выточки скосы и т.д. Совсем другой уровень проектирования, гораздо больше возможностей, чем при склейке плоских деталей. Вот что получилось: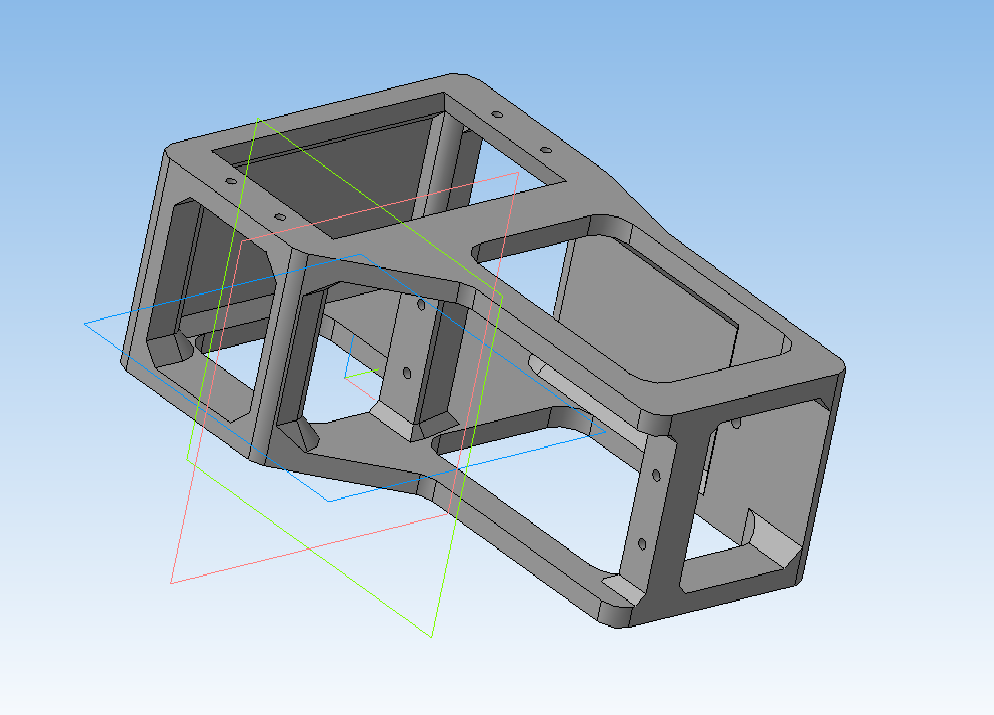
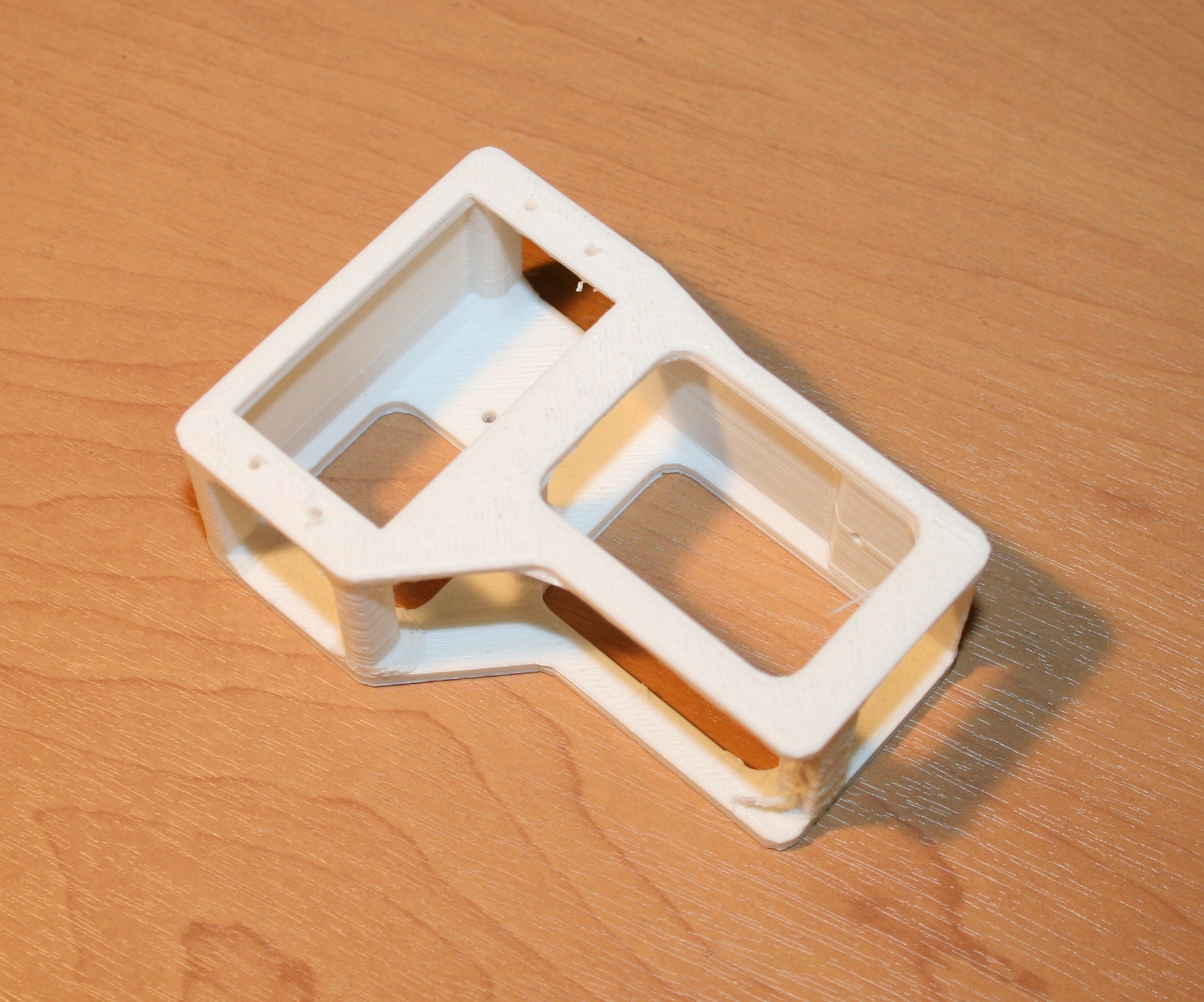
Оказалось, что напечатать эту модель на 3D-принтере (в моем представлении модель не сложная) не так то просто. На одном принтере вообще не удалось, так как основа отрывалась от подложки при печати, а на другом, удалось это сделать со второй попытки. Так что, судя по всему, недорогие модели 3D-принтеров пока не так универсальны как хотелось бы и требуют существенного опыта при печати даже несложных моделей.
Вот что получилось в результате печати на 3D-принтере:
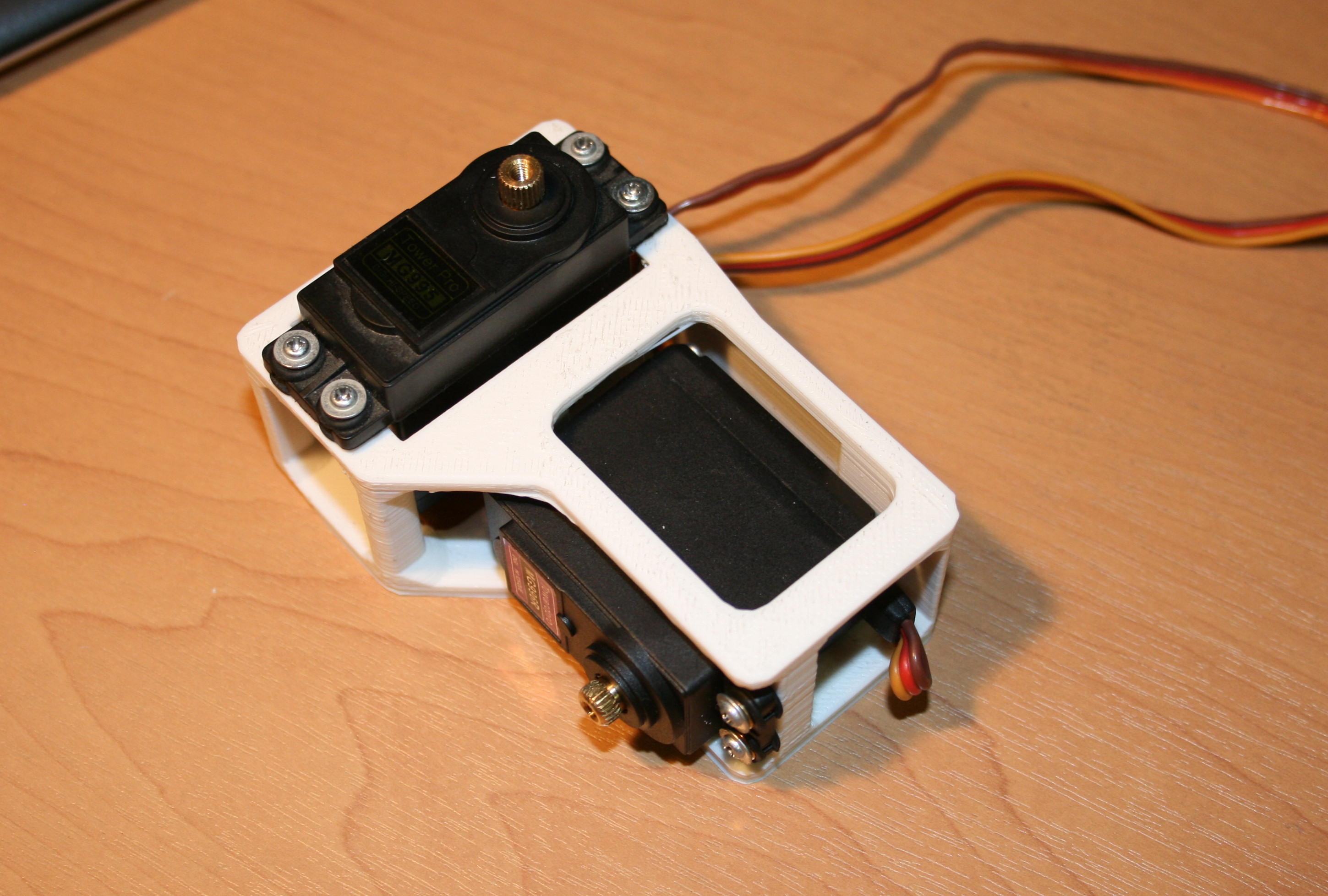
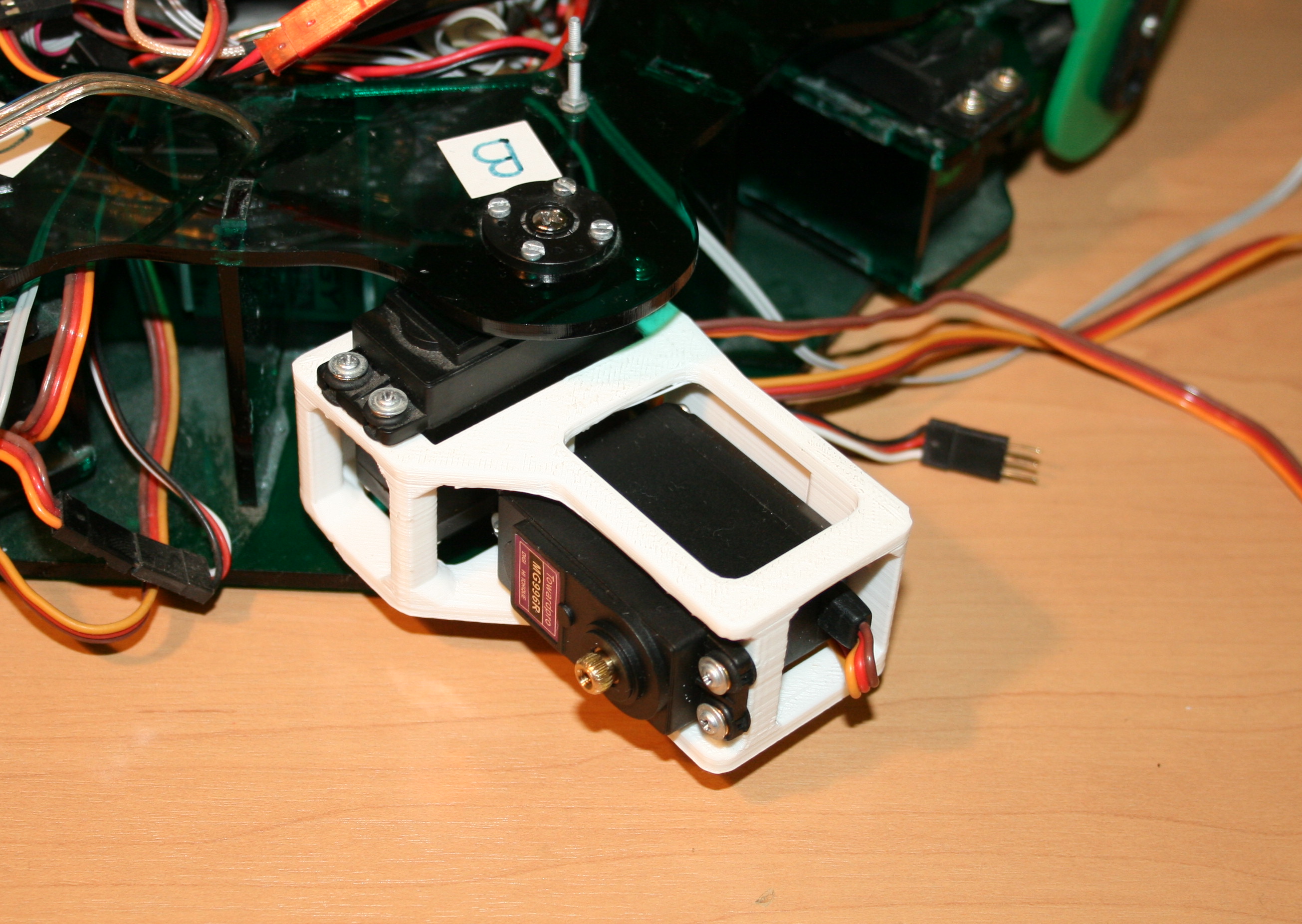
Если добавить сервоприводы, то так:
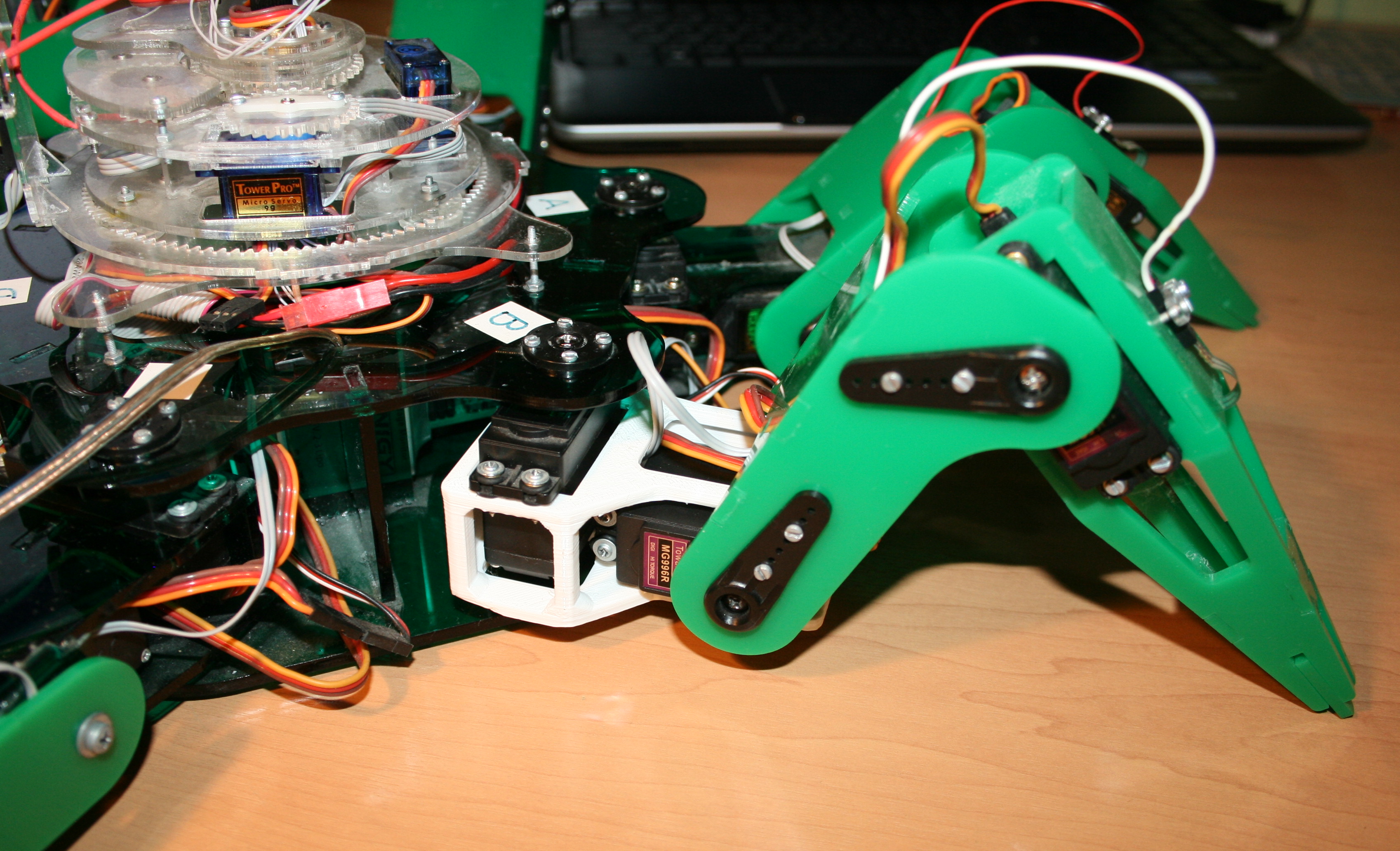
А вот так уже прикрученной к роботу:
Ну, и окончательный вариант — уже с прикрученной ногой:
Судя по ощущениям, прочность пластика (PLA) не меньше, чем акрила и он менее хрупкий. Так ли это на самом деле, проверим на практике, в ближайшее время буду пробовать выгуливать робота с новым плечом.
Изучение возможностей 3D-печати позволит отрыть гораздо большие возможностей в проектировании роботов.
PS. На следующий день испытания показали, что робот прекрасно ходит с новой ногой. Посмотрим, как долго она сможет продержаться и прочнее ли она склеенного акрила.
Перегрузка или как иногда полезно делать предварительные расчеты Получение показаний датчиков метеостанции DYKIE