Перегрузка или как иногда полезно делать предварительные расчеты
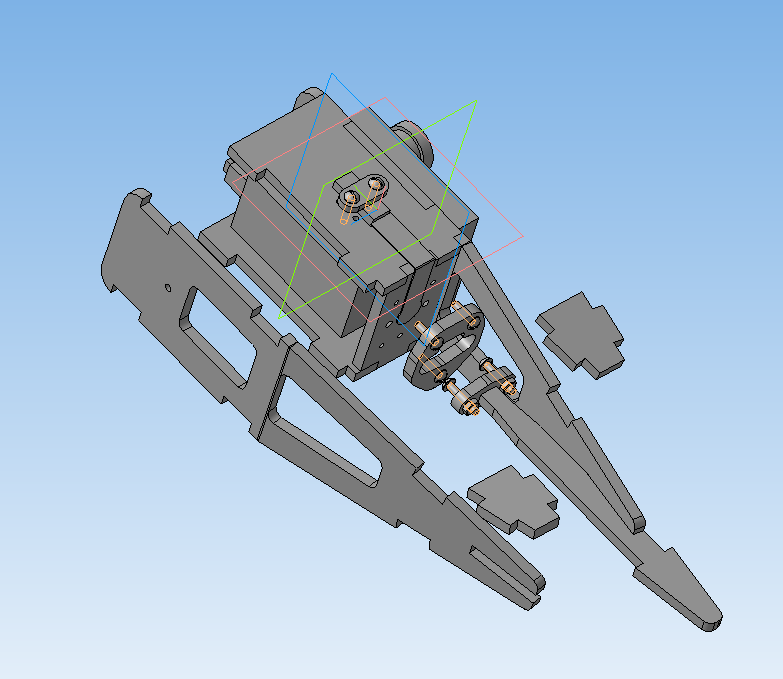
Потерпев неудачу с построением карты роботом, я решил попробовать сделать простой алгоритм самостоятельного перемещения робота, так что бы он сам выбирал направление и не натыкался на препятствия. Во время проведения испытаний случилась неприятность, сгорел сервопривод ноги. Сначала это показалось случайностью, но после того, как сгорел третий сервопривод, пришлось задуматься и немного посчитать. Оказалось, что масса робота в 2400 г при движении распределяется на три ноги, то есть каждая нога должна выдержать не менее 2400 / 3 = 700 г. Поэтому сервопривод ноги поднимающий робота на плече 141 мм должен обладать крутящим моментом не менее 700 г * 141 мм = 9,87 кг/см. Предельное значение крутящего момента сервопривода — 10 кг/см, поэтому сервоприводы практически постоянно находясь на пределе, перегревались и выходили из строя. Пришлось уменьшать длину ноги робота, так что бы сервоприводы имели запас крутящего момента и не перегревались при длительном движении робота. При этом было решено добавить давно приобретенные датчики давления, для того, что бы можно было оценивать давление на грунт каждой ноги робота и выполнять балансировку нагрузки между ногами. Так же использование датчиков давления позволит выполнять автоматическую калибровку сервоприводов ног робота. Вот что в итоге получилось:
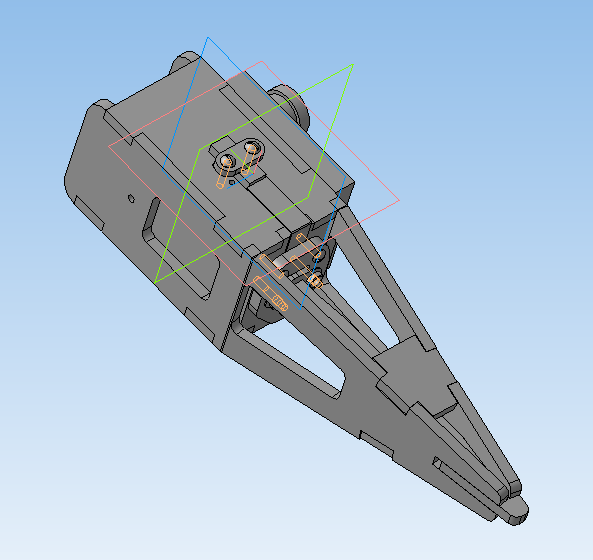 Или в разборе:
Или в разборе:
Построение карты роботом Первый опыт использования 3D принтера