Второй вариант вращающегося датчика расстояния
Как я уже упоминал ранее, первый вариант головы робота оказался не очень удачным. Прежде всего потому, что конструкция оказалась практически не разборной, но еще и очень нестабильной в плане позиционирования датчика расстояния. Поэтому пришлось разрабатывать новую кинематику для вращения датчика расстояния. Проблема в том, что большинство стандартный сервоприводов имеет угол поворота +-60 градусов, то есть 120 градусов всего. Нам же нужен круговой обзор, поэтому угол должен быть не менее 360 градусов. Поэтому без редуктора не обойтись. Вот модель варианта с редуктором:
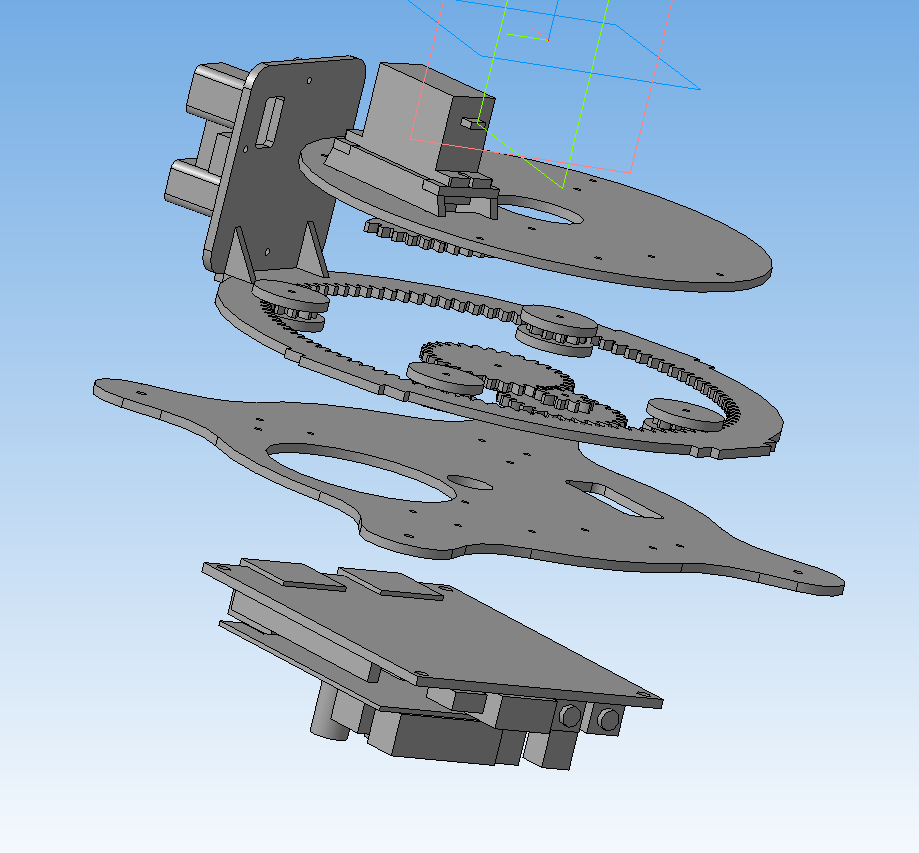
К сожалению, вариант оказался неработоспособным. Передаточное отношение редуктора 1:3 поэтому мощности сервопривода оказалось недостаточно для вращения всей этой конструкции. Так же в процессе работы пришлось столкнутся с особенностью вырезания лазером деталей из акрила. Лазерный станок режет точно по линии, но ширина реза конечно же не нулевая и зависит от параметров станка и мощности лазера. В моем случае, анализ показал, что толщина реза лазера примерно 0,4 мм. Таким образом, когда шестерни были нарезаны без учета ширины разреза лазера, появлялись зазоры и слишком тонкие зубья шестерен малого диаметра, которые ломались при нагрузки. Но, когда шестерни были нарезаны с учетом ширины лазера, с припуском 0,2 мм результат оказался хуже, так как шестерни отказывались входить с зацепление в полной мере. Детальный осмотр показал, что лазер режет не идеально ровно, его движение определяется поворотом сервоприводов станка, а это приводит к тому, что сложные поверхности содержат ступеньки. Это заметно при детальном рассмотрении под лупой и неважно в большинстве случаев, но в случае шестерен, когда одна поверхность катится по другой эти микроступеньки имеют значение. Поэтому, после ряда экспериментов, удалось установить, что оптимальный припуск примерно 0,1 мм. Однако, подозреваю, что на другом станке с другими параметрами, припуск может быть совсем другой. Одним словом, оказалось, что вырезание лазером шестерен малого диаметра из акрила не совсем удачная идея. Пришлось придумывать другие варианты, либо специализированный сервопривод с углом поворота 360 градусов (быстрые поиски в интернете не привели к нужному результату), либо высококачественный редуктор с малыми потерями (аналог металлических часовых редукторов). Так как оба варианта для меня сложны или недоступны, пришлось думать головой (голь на выдумки хитра). Я разобрал стандартный сервопривод SG90, и извлек из него поворотный резистор. Для того, что бы сервопривод мог работать без этого резистора пришлось сделать «резисторозаменитель» — кольцо нарезанное из акрила + откушенный гвоздь диаметром 1.4 мм, соответствующий диаметру вала стандартного переменного резистора сервопривода. И сразу все упростилось, теперь сервопривод вращает кольцо датчика расстояния, а резистор, через редуктор определяет положение датчика. Таким образом, используя электронику сервопривода и его стандартную логику работы мы получаем механизм с вращением более 360 градусов. При этом, конечно, мы проигрываем в скорости (она зависит от передаточного отношения шестерни сервопривода и шестерни датчика расстояния), но выигрываем в силе и точности позиционирования. Вот как выглядит рабочий вариант:
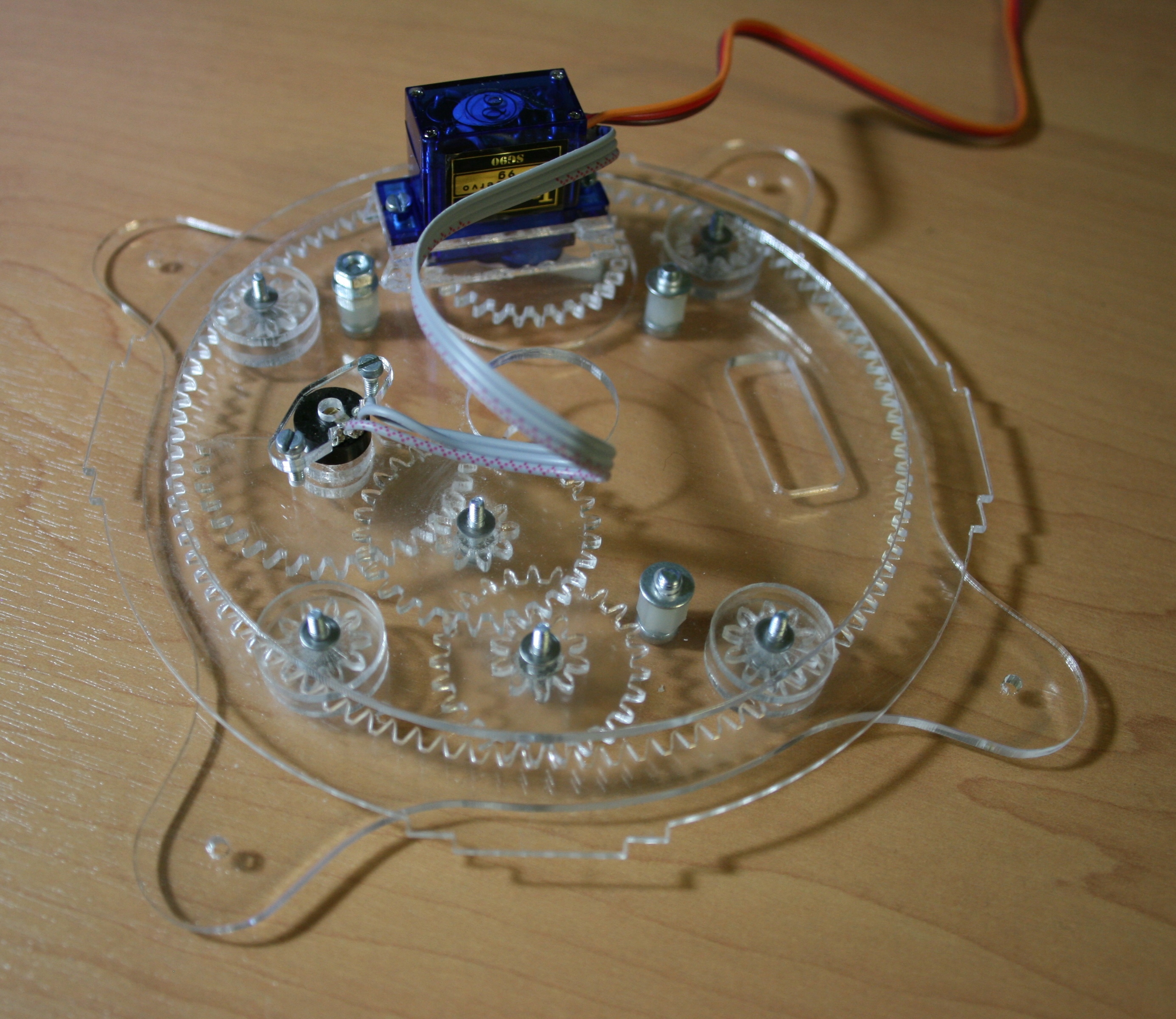
Результаты испытаний подтвердили, что механизм работоспособен и достаточно точно позиционирует датчик расстояния. Достоинство такой конструкции в том, что основа системы не вращается, вращается только кольцо датчика расстояния. Поэтому появляется возможность навесить сверху механизм вращения видеокамеры и антенну.
Вращающийся датчик расстояния в движении Второй вариант головы робота